南京远驱老款app
v2.3.8



南京远驱老款app是一款经典版本的数据控制服务平台,你可以在这里对各种参数数据进行调试,直接查看机器的工作状态,并且所有的运行记录都会进行自动保存,对比起来更加方便。通过南京远驱进行定位进行路线规划,所有参数自行搭配,让你随时随地了解其中的运行规律。
南京远驱控制器调试教程
如图所示:

南京远驱老款app如何调节跑得更远
为了让南京远驱控制器跑得更远,我们可以采用以下方法进行调节:
1、调整信号发射强度:南京远驱控制器有一个发送复位按钮,可以通过按下该按钮调整发射的信号强度。如果距离较近,则可以适当降低强度,如果距离较远,则可以适当增加强度,这样可以有效地解决信号短的问题。
2、调整天线方向:天线是南京远驱控制器信号传输的主要通道,如果调整天线方向不正确,则信号传输距离会大大受到影响。因此,在调节控制器距离的时候,可以适当改变发射和接收天线的位置和方向,找到信号传输最佳状态。
3、确保周围环境:南京远驱控制器的信号传输会受到周围环境的影响,比如墙壁、建筑、天气等。因此,在使用南京远驱控制器时,需要尽可能保证周围的环境和空间畅通无阻,防止信号传输时被干扰,从而影响距离。
通过上述步骤的调节,可以有效地解决南京远驱控制器距离短的问题,让控制器能够更好的控制电机运行,并保证运行的安全性。
南京远驱老款app辅助参数
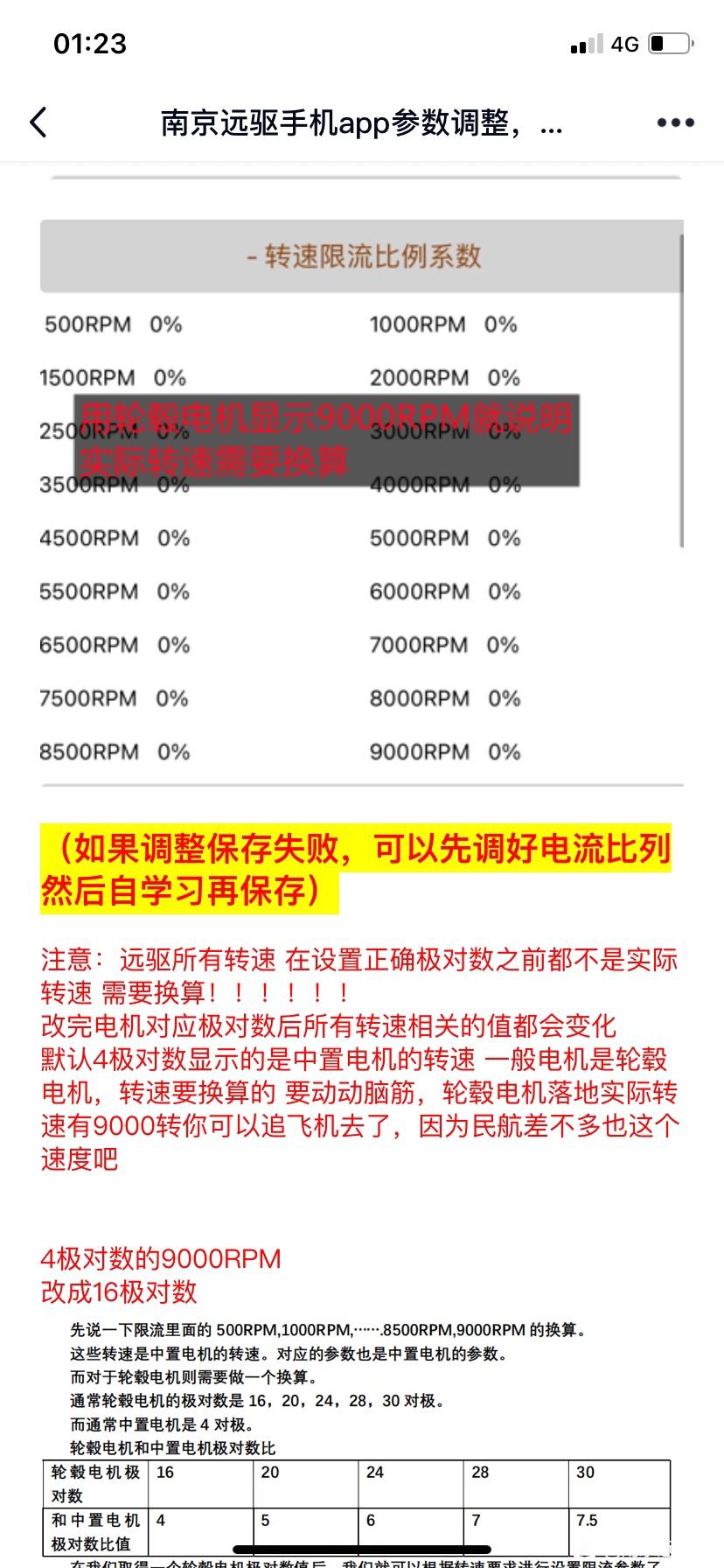
5.1三速控制:高速档,中速档,低速档
电流比例通过4个参数调节。
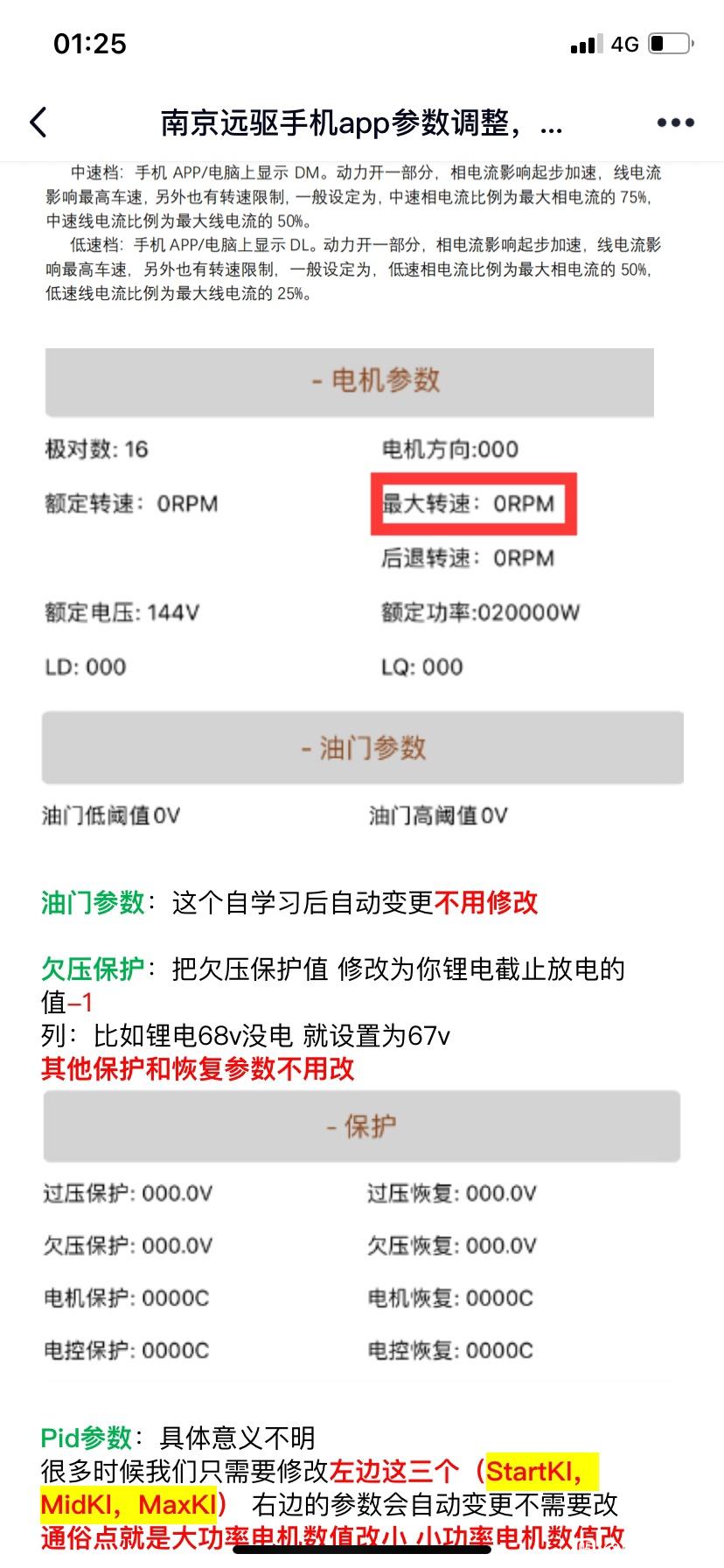
高速档:手机APP/电脑上显示D。动力全开,工作在最大线电流和最大相电流,以及最大转速。
中速档:手机APP/电脑上显示DM。动力开一部分,相电流影响起步加速,线电流影响最高车速,另外也有转速限制,一般设定为,中速相电流比例为最大相电流的75%,中速线电流比例为最大线电流的50%。
低速档:手机APP/电脑上显示DL。动力开一部分,相电流影响起步加速,线电流影响最高车速,另外也有转速限制,一般设定为,低速相电流比例为最大相电流的50%,低速线电流比例为最大线电流的25%。
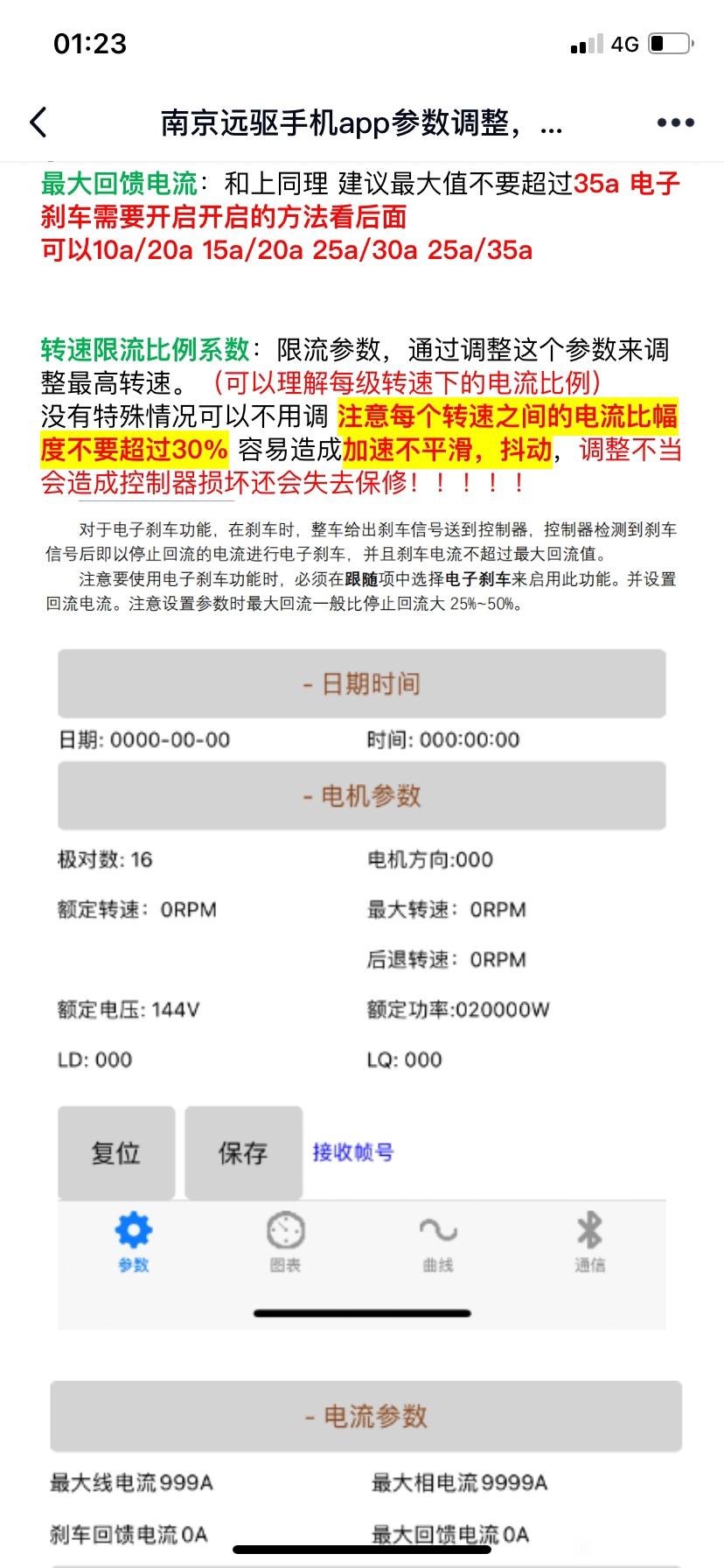
5.2 停止回流,最大回流:反充电时的充电电流限制
对于电子刹车功能,在刹车时,整车给出刹车信号送到控制器,控制器检测到刹车信号后即以停止回流的电流进行电子刹车,并且刹车电流不超过最大回流值。
注意要使用电子刹车功能时,必须在跟随项中选择电子刹车来启用此功能。并设置回流电流。注意设置参数时最大回流一般比停止回流大25%~50%。
5.3 0电量系数,满电量系数
默认设置是22。市面上大部分电机和整车采用的值。
但是有个别电机类型和整车匹配很差,起步低速段,中速段会感觉到明显的共振抖动. 调整LM值会有改善.
先从22开始,若低速段加速抖动,则降低LM,从16,14,12,11,8,5开始测试效果,中间那些数字也会起作用,一般考虑宁可大些,尽量不要太小。太小会控制不住电流,引起MOE/OVER保护,甚至烧控。所以当抖动消失后的LM值就是最佳参数,不要再调小。
注意MOE 为1表示MOE保护有效,而MOE为0则保护无效。
图片
5.4 欠压保护
有些电机和整车在LM=22时非常流畅,但是改小后反而会带来抖动,所以要注意在LM=22的情况下没有问题就不去调节这个参数。
或者发现抖动共振出现后,LM值从22改小16,14,。。。甚至5都没多大效果,则说明和这个参数无关,此时一定要改回到最大值,比如22,而不是随意一个数字保留在控制器里面。
5.5 速度表校准
霍尔脉冲仪表:霍尔脉冲个数1~16,485仪表通过这个脉冲数可以校准速度显示。
模拟仪表:60V对应10000RPM
5.6 速度表方式:脉冲/模拟/隔离脉冲
5.7:巡航
巡航有接地巡航和浮空巡航方式,一般选择接地巡航,也就是巡航线和地接触一下,开启巡航功能,以当前速度自动行驶。再按一次或者加一次油门或者刹车就会退出巡航进入手动行驶模式。
注意巡航的最高速度由低速档最高转速限制。如果超过低速最高转速时按巡航,自动行驶时,会自动降低速度到低速档最高转速行驶。
软件特色
1、软件的页面设计简洁明了,各个功能就在首页上可以看到,无需任何复杂操作。
2、每到月底系统就会自动呈现出一个报表曲线,显示我们当月出行距离和出行时间。
3、可以帮助用户实时了解自己电动车的剩余电量,如果电量不足,系统也会以短信的方式提醒我们。
软件亮点
1、智能控制:软件采用先进的控制算法,能够实现对电动车辆的精准控制,包括速度、加速度、转向等,为用户提供流畅、稳定的驾驶体验。
2、多样化的驾驶模式:软件提供多种驾驶模式选择,如经济模式、运动模式等,满足不同用户的驾驶需求。
3、电量管理:软件内置电量管理系统,能够实时显示车辆电量、续航里程等信息,帮助用户合理规划行程,避免电量不足带来的困扰。
软件测评
实时监控车辆行驶轨迹,相关信息十分完整。
更新日志
v2.3.8版本
修复部分bug
-
生活实用
系统工具